Otomatik koordinatlı kasa paketleme hattı





Otomatik koordinat durumupaketleme hattı,
paketleme hattı,
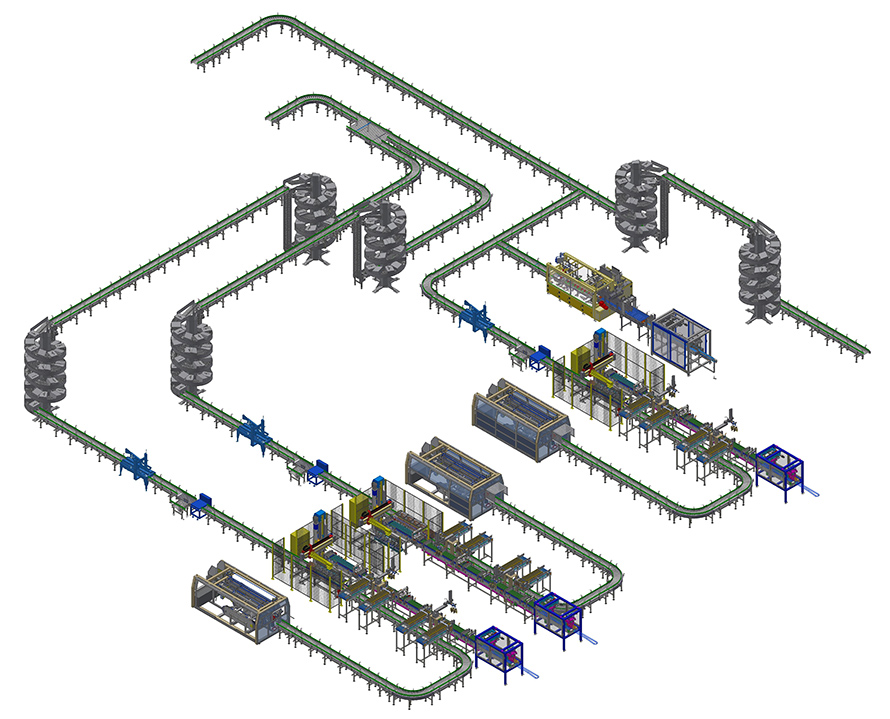
Ambalaj üretim hattı; yüksek hızlı ayırıcı, ürün taşıma hattı, kavrama taşıma hattı, Hbot, çift şaftlı hareket mekanizması, kutu taşıma hattı, algılama mekanizması, karton bölme tutucusu, karton bölme besleme sistemi, servo koordinat sistemi, şişe tutucusu ve koruyucu çitten oluşur. Yüksek hızlı ayırıcı, ürünleri çok şeritli olarak ayırırken, çift şaftlı hareket mekanizması ürünlerin geçişini hızlandırır. Ürün karton bölme istasyonuna ulaştıktan sonra, Scar robotu karton bölmeyi düzenlenmiş ürünlere yükler. Ürünler ayırma konveyörüne ulaşır. Daha sonra ürünler tutucu tarafından toplanarak karton kutuya yerleştirilir ve kutu konveyörü, ürünü içeren kutuyu dışarı taşır.
Tam paketleme sistemi düzeni
Ana yapılandırma
| Robot kolu | ABB/KUKA/Fanuc |
| Motor | SEW/Kuzey/ABB |
| Servo motor | Siemens/Panasonic |
| VFD | Danfoss |
| Fotoelektrik sensör | HASTA |
| Dokunmatik ekran | Siemens |
| Düşük voltajlı cihazlar | Schneider |
| terminal | Anka kuşu |
| Pnömatik | FESTO/SMC |
| Emme diski | PIAB |
| Rulman | KF/NSK |
| Vakum pompası | PIAB |
| PLC | Siemens / Schneider |
| İnsan-makine arayüzü | Siemens / Schneider |
| Zincir plakası/zincir | Intralox/rexnord/Regina |
Ana yapı açıklaması




Daha fazla video gösterisi
- Karton bölmeli cam şişeler için servo koordinatlı kasa paketleme makinesi
Paketleme makinesi nasıl çalışır? Ürünler bir dizi otomatik işlemden geçer.
ve taşıma üretim hattında ayıklama, ayıklamaya çevirme, hızlandırılmış tampon, paketleme makinesi, otomatik kapatma mekanizması ve son olarak taşıma hattından çıkış gibi düzenli adımlar.










